
Von der Idee zum Projekt
Hier können Sie anhand von Bildern und Videos unseren Fortschritt mitverfolgen oder sich über den aktuellen Stand unseres Projektes informieren.

Recherche
Am Anfang eines jeden Projekts steht die Recherche. Hierzu haben wir nicht nur das Internet durchsucht, sondern auch Fachkundige befragt. Letztendlich haben wir uns für ein Arduino gestütztes System entschieden. Um spätere Fehler frühzeitig zu erkennen und um die Umsetzbarkeit unseres Projektes zu überprüfen, begannen wir mit einer Testphase.
Testphase I
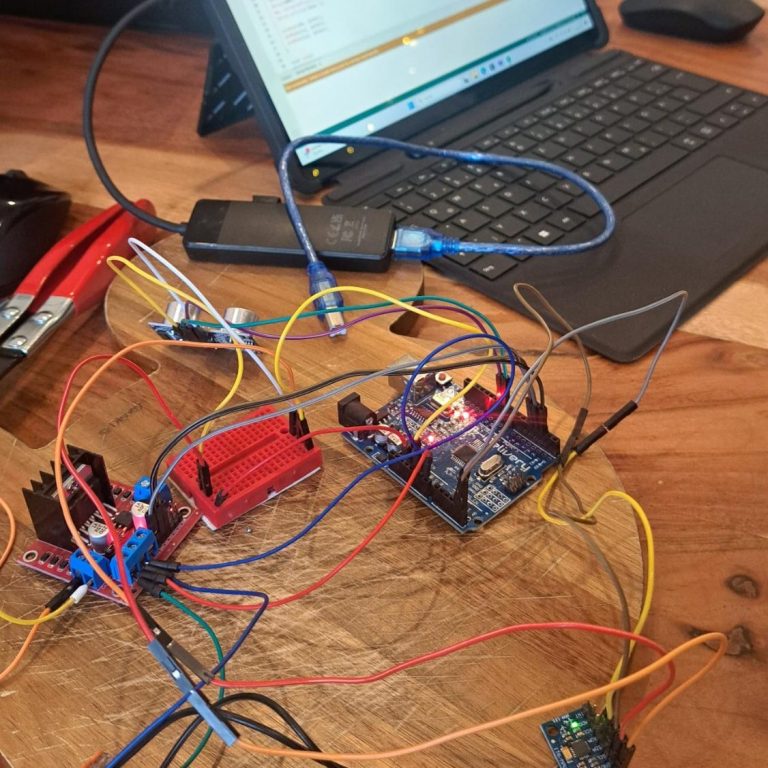
Wir bestellten uns zunächst diverse Sensoren (HC-SR04, MPU- 6050) sowie einen Arduino Uno und eine kompatible Steuerung (fs-i6x). Nun wurden die Komponenten mit ihrer zugehörigen Programmierung auf ihre Funktion getestet, um herauszufinden ob diese für unsere Zwecke dienlich sein würden. Die Motoren und die dazugehörigen Treiber verwendeten wir in dieser Phase noch nicht.
Testphase II
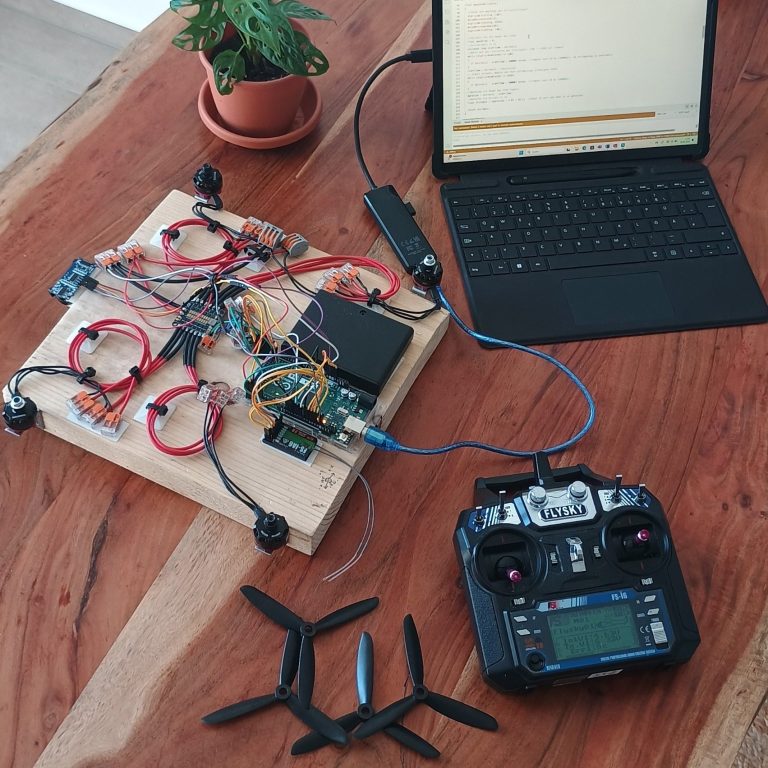
Um unser Programm und die Funktionen der Drohne im "Trockenlauf" testen zu können, befestigten wir alle unsere Komponenten auf ein Holzbrett. Dadurch konnten wir Anforderungen wie zum Beispiel das Neigen bzw. das Kippen und den automatischen Höhenausgleich der Drohne besser simulieren und testen, ob unsere Programmierung korrekt ist.
Testphase III
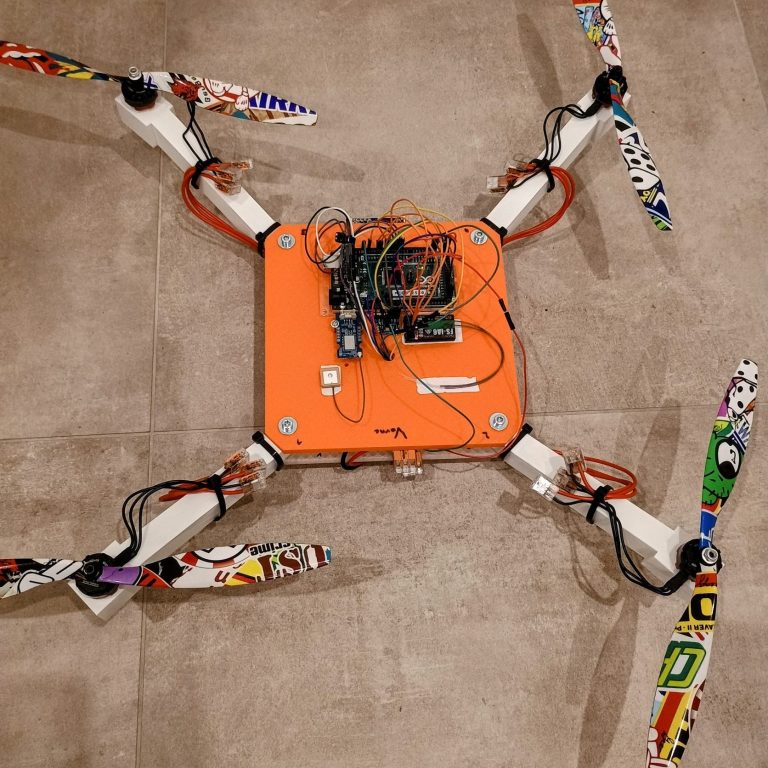
Da der "Trockenlauf" bislang reibungslos verlief, konnten wir uns in dieser Phase auf die Konstruktion und Weiterentwicklung des Designs unserer Drohne konzentrieren. Nach dem Zusammenbau der einzelnen Komponenten können wir zudem mit den ersten Flugtests starten. Diese Tests sind entscheidend für die Feinabstimmung der Steuerung und Optimierung des Designs.

© Copyright. Alle Rechte vorbehalten.
Wir benötigen Ihre Zustimmung zum Laden der Übersetzungen
Wir nutzen einen Drittanbieter-Service, um den Inhalt der Website zu übersetzen, der möglicherweise Daten über Ihre Aktivitäten sammelt. Bitte überprüfen Sie die Details in der Datenschutzerklärung und akzeptieren Sie den Dienst, um die Übersetzungen zu sehen.